
Einen Seecontainer zu entleeren ist Knochenarbeit. In einer Schicht bewegt ein Arbeiter gut und gerne 80 Tonnen Fracht. Und das bei Temperaturen bis zu 80 Grad Celsius. So heiß kann es nämlich im Sommer in den Containern werden. Es ist nicht verwunderlich, dass es insbesondere in Zeiten des Arbeitskräftemangels immer schwerer wird, ausreichend Mitarbeiter für diese stark belastende Tätigkeit zu finden.
Das Problem ist relevant. 70 Prozent aller über den Seeverkehr transportierten Frachten werden in Seecontainern befördert. Entsprechend hoch ist der Aufwand für das Be- und Entladen dieser Container. Und während in den meisten Bereichen entlang der Lieferkette längst automatisierte Systeme Einzug gefunden haben, werden Container immer noch zum allergrößten Teil manuell entleert. Dies soll sich mithilfe eines neuartigen Roboters ändern. Dazu forscht das Bremer Institut für Produktion und Logistik an der Universität Bremen (BIBA) mit den Entwicklungspartnern BLG Handelslogistik, SCHULZ Systemtechnik Bremen und FRAMOS im Projekt „Interaktives Robotiksystem zur Entleerung von Seecontainern“ (IRiS).
Flexibitlität und einfache Handhabung sind der Schlüssel
Die Experten von IRiS sind nicht die ersten, die sich mit dieser Herausforderung beschäftigen. Dazu Wirtschaftsingenieur Thies Beinke, IRiS Projektleiter am BIBA: „Es gibt bereits Systeme am Markt. Doch diese genügen aufgrund hoher Investitionskosten und hohem Aufwand für die Inbetriebnahme den Anforderungen von Hafenbetreibern zumeist nicht.“
IRiS geht daher andere Wege. Ziel ist, laut Projektplan, die Entwicklung eines mobilen Roboters für die Verbesserung der Effizienz von Umschlagprozessen an Seehäfen. Der Roboter soll ohne große Anpassungen an die vorhandene betriebliche Infrastruktur innerhalb kürzester Zeit zur Entladung eingesetzt werden können. Das Bundesministerium für Verkehr und digitale Infrastruktur (BMVI) fördert das dreijährige Vorhaben im Rahmen des Programms für Innovative Hafentechnologien (IHATEC) mit 2,2 Millionen Euro. Der Gesamtumfang beträgt 3,16 Millionen Euro.
Besonderen Wert wird auf die Gestaltung der Mensch-Roboter-Interaktionsschnittstelle gelegt. Denn hier entscheidet sich, ob die Zusammenarbeit klappt. Sogenannte Interaktionsmodule sollen von einem Leitstand aus eine intuitive Kontrolle und Steuerung eines oder mehrerer Roboter ermöglichen. „So können die Mitarbeiterinnen und Mitarbeiter die Roboter überwachen und bei Störungen schnell mit wenig Aufwand und vor allem ohne Programmierkenntnisse eingreifen. Das Risiko kostenintensiver Systemstillstände wird minimiert.“, so Thies Beinke.
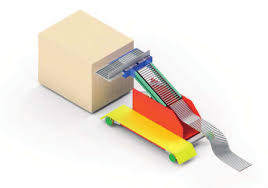
Der mechatronische Aufbau ist inzwischen weitestgehend abgeschlossen: Der Roboter wird mittels eines Systems von Sauggreifern ein ganze Reihe Kartons gleichzeitig aus dem Container ziehen, sie drehen und auf dem Förderband verteilen können. Eine hochmoderne industrielle Bildverarbeitung des Projektpartners FRAMOS sorgt dabei für eine zuverlässige Klassifizierung der Packszenarien und Analyse des Containerinhaltes. Das System kann unter anderem auch erkennen, ob ein Container vollautomatisch vom Roboter entladen werden kann oder eine manuell vom Leitstand aus gesteuerte Bedienung erfordert.
Das Prinzip 20/80
Der Entwicklung im Forschungsprojekt IRiS liegt ein pragmatisches und ökonomisch effizientes Automatisierungsdesign zugrunde. Dazu noch einmal Thies Beinke: „Theoretisch ließe sich jeder Handgriff beim Entleeren mittels Roboter automatisieren. Das wäre aber nicht zielführend, denn ein solches System wäre unflexibel, fehleranfällig und letztlich auch nicht schnell genug. Im Rahmen von IRiS soll die Maschine diejenigen 80 Prozent der Arbeiten erledigen, die sich gut standardisieren lassen. Die übrigen 20 Prozent, die höhere Flexibilität und kognitive Fähigkeiten verlangen, verbleiben beim Menschen.“
Genau dieser pragmatische Ansatz macht das Projekt sehr vielversprechend für die logistische Praxis. Wenn bis zu 80 Prozent der Standardsituationen durch das Robotiksystem abgearbeitet werden, können die geforderten Durchlaufzeiten nachhaltig sichergestellt und Kosten gesenkt werden. Für die vorhandenen Arbeitskräfte verbleiben genügend höherwertige Tätigkeiten.
Den Kostenaspekt betont auch Claus Freydag, Executive Vice President Ocean Freight DB Schenker: „Der Druck auf Logistikkosten der Verlader bzw. Importeure ist unverändert hoch und dürfte sich in Zeiten konjunktureller Abschwächung in den nächsten Jahren erhöhen. Da das Personal immer noch der größte Kostenblock darstellt ist jedes manuelle Handling ein Kostentreiber. Hier dürfte IRiS zum richtigen Zeitpunkt eine attraktive Lösung auf den Markt bringen.“
Das Projekt verläuft bislang sehr vielversprechend und nach Projektplan. Noch in diesem Jahr wird ein Prototyp unter Laborbedingungen beim BIBA die Arbeit aufnehmen. Nächstes Jahr erfolgt dann der Transfer in die echte industrielle Umgebung.
About the Author

Dr. Frieder Schwitzgebel studierte Philosophie und Physik an den Universitäten Mainz und Dijon und arbeitet seit 1996 als Unternehmensjournalist. Er ist Dozent für Wirtschaftsphilosophie an der Verwaltungs- und Wirtschaftsakademie Wiesbaden. Seine Schwerpunkte sind Neue Technologien, Kontraktlogistik und die Plattformökonomie.


