
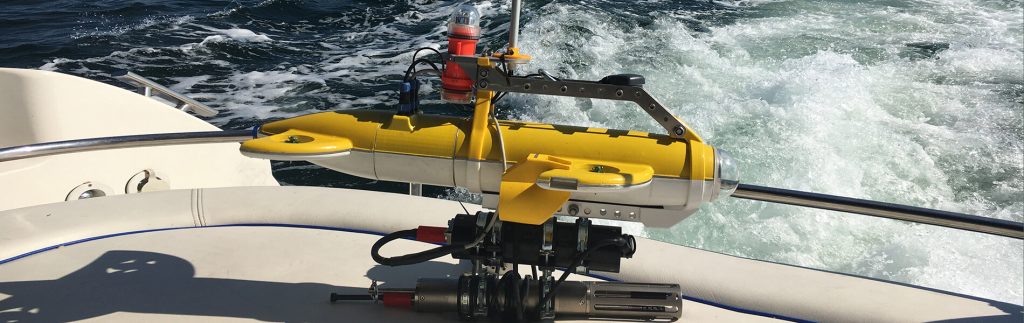
“… We all live in a yellow submarine, yellow submarine, yellow submarine …” Der Beatles-Klassiker drängt sich beim Anblick eines Exemplars der MONSUN-Flotte einfach auf. Auch wenn er nicht so ganz passt, denn bei einer Länge von 60 Zentimetern handelt es sich bei MONSUN um einen unbemannten U-Boot-Roboter. Quitschgelb ist er aber. Und interessante Einsatzmöglichkeiten rund um die Seefahrt bietet er auch.
Das Besondere an der Entwicklung des Instituts für Technische Informatik der Universität Lübeck ist, dass die Monsun-Roboter schwarmfähig sind. Sie sind also nicht allein unterwegs, sondern mehrere Roboter erledigen nach dem biologischen Vorbild eines Schwarms gemeinsam eine Aufgabe. Dazu kommunizieren die Mitglieder des Roboter-Schwarms, ähnlich wie Meeressäuger, über akustische Signale miteinander. Ihre Aufgabe müssen sie unter Wasser autonom erledigen, denn es gibt zu ihnen weder eine Funkverbindung noch können sie dort per GPS-Signal geortet werden. Man spricht bei solchen Tauch-Robotern deswegen auch von „Autonomous Underwater Vehicles“ (AUV).
Insgesamt sechs kleine Propeller – vier vertikale und zwei horizontale – machen das kleine Tauchfahrzeug extrem wendig und lassen sogar Drehungen um die Längs- und Querachse zu. Tauchfähig sind die MONSUN Roboter bis in 20 Meter Tiefe. Wendigkeit und Folgeverhalten der MONSUN Tauchroboter kann man in dieser frühen Forschungs-Präsentation sehen:
Inspektionseinsätze autonom unter Wasser
Ähnlich wie fliegende Drohnen sind die kleinen AUVs prädestiniert für Inspektionseinsätze. Sie übernehmen die Inspektion von Verankerungen von Off-Shore-Windrädern, Hafenbecken oder auch Schiffsrümpfen. Für Industrietaucher sind solche Arbeiten anstrengend und gefährlich. Aber auch Messungen der Wasserqualität lassen sich durchführen – im Schwarm sogar besonders gut, weil dann Proben an mehreren Stellen genommen werden können.
Letztlich lassen sich beliebige Kameras und Geräte an die Tauchroboter installieren. Bei ozeanischen Forschungseinsätzen misst die Flotte optional unter anderem Temperatur, Salzgehalt und Druck des Wassers. Der Einsatz eines ganzen Schwarms lässt auch den Ausfall eines einzelnen Roboters verschmerzen, die Mission kann dennoch beendet werden.
Ihren ersten realen Einsatz hatten die MONSUN bereits 2016, während einer Expedition zur Vermessung von Meereswirbeln in der Ostsee. Hierbei bedienten sich die Forscher eines ‚Tricks‘, um mit den Robotern Kontakt halten zu können: Ein MONSUN blieb dabei an der Oberfläche und bestimmte seine Position per GPS. Ein weiterer MONSUN tauchte ab und fuhr den gleichen Kurs in einer vorher festgelegten Tiefe synchron mit. Über akustische Signale stimmten sich die beiden Roboter untereinander ab.
Auch im Lübecker Hafenbecken haben die Roboter nach dem Rechten gesehen, dort sollte der Zustand der Kaimauer überprüft werden. Für diese Mission montierten die Wissenschaftler kurzerhand zusätzlich zum Sonar-Gerät auch eine Action-Kamera und eine leistungsstarke LED-Lampe. Das Sonar durchdringt ungefähr 100 Meter weit das Wasser und liefert grobe Abbildungen der Kaimauer. Möchte man mittels der Action-Kamera in dem trüben Wasser Details sehen, muss der Roboter jedoch – ähnlich wie ein Industrietaucher – nah an die Kaimauer heran und kann diese dann filmen. Deutlich verkürzt wird ein solcher Sichtkontrolleinsatz natürlich, wenn ein ganzer Schwarm die Kaimauer inspiziert.
Solche Anwendungen sind für Hafenbetreiber genauso wie für Schiffswerften und Reedereien interessant und lassen auf weitere Einsatzmöglichkeiten hoffen.
About the Author

Julia Weise berichtet über komplizierte technische Themen, ohne dass man dafür ein Fremdwörterbuch braucht. Sie schreibt über Trends und Herausforderungen unter anderem in der Kontraktlogistik und dem Warehouse Management sowie über smarte Softwarelösungen. Die studierte Friedens- und Konfliktforscherin betreut in der Frankfurter PR-Agentur Adel & Link B2B-Kunden und Unternehmen aus der Tech-Branche.


